
Technology Improves Shovel Productivity
Proper positioning prevents poor performance
Inefficient shovel cycles, difficult material identification, unclear progress line definitions, and extensive manual surveying are some of the challenges that shovel and excavator operators face on a regular basis. High-precision machine guidance solutions can help resolve these challenges by using GPS signals to provide equipment operators with impressive positional accuracy.
Modular Mining Systems ProVision Machine Guidance solution, which was released for excavators 20 years ago this year, provides positional accuracy to the centimeter. The system also employs high-precision elevation control, which helps to improve bench height management, ramp accuracy, and current floor elevation accuracy, while drastically reducing ore boundary staking and manual progress surveying. The high-precision elevation control also allows shovel operators to remain on grade as they dig into the face to virtually eliminate rework due to under- and over-cutting.
Machine guidance technologies that facilitate accurate material identification and delineation, like the ProVision solution, can also help mines improve their shovel productivity by reducing misrouted material. In addition, the systems real-time availability of geographical data improves adherence to the mine plan, and quickly notifies operators of plan deviations to further improve accuracy and productivity.
Challenges With Current Spotting Methods
Typical truck spotting methods employed
across many mine sites today are often
inefficient. As the shovel operator maneuvers
his bucket into the desired loading
location prior to a trucks reversal, he
creates an extension in the overall cycle
time, resulting in productivity loss. This
spotting time is a non-productive and
unnecessary portion of the loading cycle,
and is exacerbated by the time required
for the truck operator to reverse to the
correct loading spot and reposition as
necessary. In addition to contributing extra
time to the loading cycle, the shovels
resulting hang time consumes unnecessary
energy in its requirement to hold a
full bucket while waiting for the truck.
These spotting methods can also create potential safety risks from truck-shovel impacts. The truck-shovel exchange is one of the most frequently occurring processes in a mine, said Charles Orr, product manager for Modulars machine guidance systems. It can occur more than 800,000 times per year at a large site. Even if an impact occurs in only a fraction of those interactions, the potential safety risk and equipment damage that often results can be significant.
By reducing the spotting segment of the loading cycle, even by seconds, mines can potentially increase their overall production capacity by millions of tons annually.
Improving the Excavation Load Cycle
The excavation load cycle plays a critical
role in the surface mining production process,
making it an ideal target for optimization.
In addition to the potential overall
production increases, improving the load
cycle also enables mines to:
Minimize shovel hang time;
Optimize shovel swing angle;
Maximize trucking capacity; and
Increase compliance to plan.
Achieving this ideal load cycle is often more easily said than done, however; haul truck maneuvering efficiency at shovels, crushers, and dumps can vary dramatically with operator skill. This variability has led mines to employ standard operating procedures geared toward the sites lowest capability level to ensure a safer production. While such traditional practices as bucket spotting and single-side loading can help reduce the risk of truck-shovel impacts, they often do so at the cost of productivity. As the shovel hang time that results from these traditional practices increases, the productivity of both the shovel and truck decreases.
Operator-assist Technologies for Load Cycle Optimization
Operator-assist technologies can help optimize
the load cycle to significantly improve
the productivity of both shovels and trucks
by efficiently guiding haul truck operators
as they reverse toward the shovel loading
position, without guidance from the shovel
operator. The Guided Spotting system, part
of Modulars ProVision Machine Guidance
solution, is one such technology, and can
help optimize the excavation load cycle
by potentially equalizing the performance
of all operators to a capability close to (or
even beyond) that of the most experienced
operator. The systems high-precision guidance
and real-time communication and integration
between the shovel and truck enable
precise guidance to a predetermined
loading point, governed by the shovel.
The Guided Spotting system is designed to improve both shovel productivity and operator safety awareness during the truck spotting and loading process, and utilizes visual displays mounted near-side mirrors to leverage existing practices, rather than seeking to replace those practices with technology. The symbology utilized on the visual displays is operator-friendly and easy to interpret from the peripheral line of sight, helping even the least-skilled operator to potentially perform as efficiently as the most-skilled. In addition, the Guided Spotting system provides the truck operator with real-time feedback regarding his exact location, relative to the desired spotting point.
The system allows the shovel operator to specify his desired loading point(s) for both single- and dual-sided loading and integration between the ProVision solution and Modulars DISPATCH Fleet Management System facilitates optimization of the next available truck assignment to further decrease the excavation load cycle time and increase fleet production capacity. The shovel operator can also update or change the loading points without assistance from the central office or survey team.
After extensive successful field trials
at a large mine in North America, the system will be released later this year. It has
the potential to:
Increase shovel productivity by 4% to
35%;
Contribute up to two to eight additional
loads per hour;
Reduce swing time by up to 15%;
Reduce shovel energy consumption due
to hang time; and
Achieve additional gains by eliminating
re-spotting.
Technologies to Increase Shovel Uptime
Shovels are some of the most important
pieces of equipment on a mine site, but
maintenance for them is often overlooked;
since many haul trucks use a fleet management
system that helps to centralize incoming
data via telemetry, they can provide
more information for maintenance teams to
immediately act on. Key performance indicators
(KPIs) for maintenance often place
emphasis on fleet availability. Since mines
typically have more trucks than shovels in
their fleets, truck maintenance is often the
fastest and easiest way to fulfill this KPI.
But from a production standpoint, having
a plethora of available trucks means very
little if no shovel is available to load them.
Additionally, shovels receive a high-operational priority, which can conflict with maintenance initiatives. Prolonging scheduled maintenance might help sustain production in the short term, but often results in increased and unscheduled downtime later if the prolonged maintenance results in a failure or increased wear and tear to the shovel.
Planned shovel maintenance requires
careful time management. Modulars MineCare
Maintenance Management solution
helps maintenance teams prioritize
objectives from a condition-based approach,
rather than a time-based one, relying
on OEM and custom-defined alarms
to identify potential issues before they
result in catastrophic damage and costly
downtime. The MineCare solution is OEM
agnostic, providing interfaces to the most
OEMs in the industry, and allows users to
establish custom alarms based on time
series data and OEM events. The solution
captures such time series data as:
Stress monitoring for shovel boom, arm
and frame;
Engine and related energy consumption;
Hydraulics and electrical systems; and
Digging conditions and blast quality.
The MineCare solutions ability to collect an abundant amount of data from each of the shovels across a sites fleet, and translate that data into actionable information, can help maintenance teams decrease their unplanned shovel maintenance to further increase productivity.
As the mining industry continues to rebound, mines will continue to look for ways to optimize efficiencies wherever they can. Since shovels and excavators play such a critical role in the open-pit mining process, their productivity, uptime and availability become excellent optimization targets. Through machine guidance, operator assist, and maintenance management technologies, Modular Mining Systems provides the value mines need to optimize their equipment, empower their people and drive production.
This article was written and submitted by Modular Mining Systems. For more information, contact www.modularmining.com.
Evaluating Performance: Hydraulic Excavators vs. Rope Shovels
At Haulage & Loading 2017, University of Alberta Professor Tim
Joseph presented the results of ongoing studies that compare
the dig performance for a hydraulic excavator versus an electric
rope shovel. They evaluated similar mining-class machines in
terms of the energy required to excavate a unit quantity of the
same material from a mining face. One of the initial findings
was that the energy per unit excavation quantity for rope shovels
and hydraulic excavators working in the same muckpile are, in
fact, identical. This proved the fact that the amount of energy
to excavate a unit quantity, regardless of the excavating tool, is
constant. The energy required is related to the material to be
moved and not the machine.
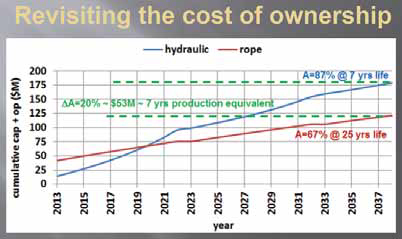
But, these results do not indicate whether one primary excavator is better than another; nor does it represent the total picture driving the selection of one excavating tool over another. The total cost of ownership (TCO) including capital (plus sustaining capital), operating and maintenance (O&M) costs, time, availability and utilization (productivity and efficiency of use) must also include the qualitative decisions regarding mining method and the mode of application; much of which is driven by the geological, operating and environmental conditions that are highly site specific.
Another parallel study of rope shovel and hydraulic excavator performance focused on availability, productivity and life cycle costs (with a sub-focus on maintenance costs) for up to 60,000 operating hours per machine, where data was available. Each machines performance was assessed by operating hours, maintenance activity impacting availability, and productivity per cubic meter (m3) of bucket capacity as a comparison normalizing factor, regardless of excavator size. Cost of ownership, including capital outlay, operating and maintenance costs including but not limited to spare parts, fuels, lubricants, electricity and consumables, were considered.
The researchers pulled together costs for both types of machines and projected that over the expected life of the machine, 25 years for a rope shovel and nine years for a hydraulic excavator. If the [TCO] was compared on a production equivalent basis, the availability difference between the rope shovel and hydraulic excavator amounted to 20% or $53 million over seven years, Joseph said. The rub, however, is that everyone calculates availability differently.
To establish an availability standard, they conducted a massive survey of surface mines and plotted availability looking at distribution. Taking the mean, they found an 85% correlation for the availability standard developed. If we compare the data for the two types of machines, the availability of the rope shovel is roughly twice that of the hydraulic excavator, Joseph said. Looking at mines sites with both types of machines working in similar mining conditions, it was close to double, confirming the results of the study. This would be a practical reference tool for engineers to predict availability as a function of hours.
The O&M costs for a hydraulic excavator are higher than a rope shovel on a production-equivalent basis. As the life of the hydraulic excavator deteriorates, the rope shovel holds constant, Joseph explained. The rope shovels are production machines, while the hydraulic excavators are moving about the mine, Joseph said. In true productivity comparisons, they should be much closer, but they are not because of how they are used. Production wise, the biggest difference is primarily found in the dig cycle time, Joseph said. It seems as though operators take more time with hydraulic excavators in face loading applications to improve the buckets fill factor. The difference between 48 seconds for a rope shovel compared to 60 seconds for a hydraulic excavator makes a huge difference over the life of the machine.
Maintenance costs for a hydraulic excavator are higher. The difference in maintenance costs between a rope shovel and a hydraulic excavator is 5.5 times, Joseph said. This is important for the equipment selection process. With exception of the electrics and the electronic controls, rope shovels havent changed much, Joseph explained. On the other hand, the systems that have changed on the hydraulic excavators have changed a lot, Joseph said. These machines are more complex, which requires more training and that slows the process. Over the course of 25 years, we see an availability of 67% for the rope shovel and 85%-87% for the hydraulic excavator, but the hydraulic shovel is not always loading.
The results of the research also indicated higher production rates by excavator of similar capacity and age. In general, electric rope shovels, with higher initial purchase cost, exhibited lower service cost per m3 of capacity, becoming overall more cost effective within 5 years (~30,000 hours) of operation over the hydraulic excavator counterpart of similar capacity.